Plataforma Strapdown
Projeto de uma plataforma Strapdown composta de sensores inerciais e o microcontrolador ESP-32 da Espressif.
Obter a atitude de drones, veículos subaquáticos e outros dispositivos com 6 graus de liberdade é uma das tarefas mais desafiadoras no projeto de sistemas de controle de navegação. Por este motivo, muitos projetos utilizam programas proprietários ou limitam-se á simulações. Neste trabalho é apresentado um sistema completo para determinação de atitude capaz de fornecer medidas calibradas e atitude estimada utilizando sensores MEMS, com microcontrolador de baixo custo e baixo consumo energético. Acelerômetro e magnetômetro são calibrados online no sistema embarcado como emprego do método dos mínimos quadrados sem auxílio de equipamentos externos. O estado estimado é computado com um rápido algorítimo algébrico de quatérnios consumindo menos de 1,5ms com emprego de um filtro aditivo de Kalman linear.
Neste projeto é apresentado métodos de calibração de três sensores:
- Acelerômetro;
- Giroscópio; e
- Magnetômetro.
Grupo de trabalho
Este trabalho faz parte de um projeto que visa o desenvolvimento de protótipo de veículos não tripulados. Para saber mais acesse: Navigation, Position and Time in Unmanned Aerial Vehicles in environments with no GPS/GNSS signal
Trabalho de graduação e publicação
Este projeto é resultado do Trabalho de Graduação de Engenharia Aeroespacial
Artigo publico no Congresso Brasileiro de Automática no ano 2020.
A base desenvolvida possui o sensor preso como pode ser visto na figura abaixo:
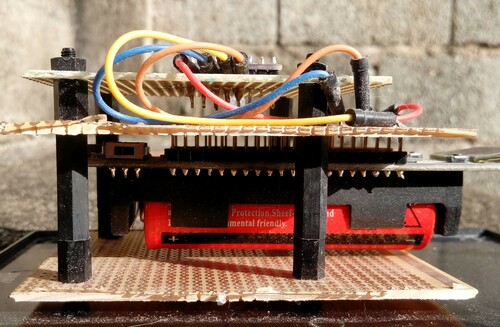
Depois de montada e fechada, o algoritmo de calibração do acelerometro precisa da tomada de dados nas seis orientações para resolver o problema de minimos quadrados.
Funcionalidade
O projeto fornece um vetor de dimensão 4+3+3+3+3+1 = 17 floats. Na seguinte sequência:
| Componentes do quatérnio de atitude | Ângulos de Euler | Acelerômetro | Magnetômetro | Giroscópio | Intervalo de tempo |
|---|---|---|---|---|---|
| normalizado | graus | m/s | normalizado | rad/s | segundos |
Todo os processo se passa em um sistema embarcado composto pelo microcontrolador ESP-32 da Espressif e a IMU MPU-9250 da Invensense.
Para mais informações acesse o repositório GitHub que contém as informação e o código.