plataformaStrapdown
Plataforma Strapdown
Obter a atitude de drones, veículos subaquáticos e outros dispositivos com 6 graus de liberdade é uma das tarefas mais desafiadoras no projeto de sistemas de controle de navegação. Por este motivo, muitos projetos utilizam programas proprietários ou limitam-se á simulações. Neste trabalho é apresentado um sistema completo para determinação de atitude capaz de fornecer medidas calibradas e atitude estimada utilizando sensores MEMS, com microcontrolador de baixo custo e baixo consumo energético. Acelerômetro e magnetômetro são calibrados online no sistema embarcado como emprego do método dos mínimos quadrados sem auxílio de equipamentos externos. O estado estimado é computado com um rápido algorítimo algébrico de quatérnios consumindo menos de 1,5ms com emprego de um filtro aditivo de Kalman linear.
Grupo de trabalho
Este trabalho faz parte de um projeto que visa o desenvolvimento de protótipo de veículos não tripulados. Para saber mais acesse: Navigation, Position and Time in Unmanned Aerial Vehicles in environments with no GPS/GNSS signal
Trabalho de graduação e publicação
Este projeto é resultado do Trabalho de Graduação de Engenharia Aeroespacial
Artigo publico no Congresso Brasileiro de Automática no ano 2020.
Depedências
Este projeto utiliza a biblioteca Eigen (por este motivo o #include "../eigen/Eigen/Dense") para computa das operações de álgebra linear. Para completar a transmissão da telemetria o projeto utiliza o API ESP-NOW da Espressif, portando, para receber os dados outro ESP-32 deve esta conectado a um pc e com o código de coleta de dados da telemetria carregado.
Instalação
Para instar esses bibliotecas basta executar o comando:
git clone https://github.com/roneydua/plataformastrapdown.git
Foco do programa:
O foco destas bibliotecas é de construção para uma plataforma strapdown de seis graus de liberdade tal que forneça:
- Dados de giroscópio, acelerômetro e magnetômetro da MPU9250 calibrados. Sendo que:
- Os giroscópios são calibrados com a eliminação do erro sistemático com a função
(IMU::calibraGyro()); que atualiza a variável_biasGyroque é um vetor 3x1. -
O magnetometro é calibrado pelo método geométrico com a função
int calibracaoGeometrica(MatrixXf &data, Matrix3f &sF, Vector3f &bias, float moduloCampo).Para utilizar este método é necessário coletar medidas rotacionando a plataforma. Durante a rotação estas medidas coletadas são armazenadas em uma matriz Nx3
&dados. Quando mais dados coletados, mais acurada costuma ser a calibração (500 medidas costumam apresentar bons resultados).&sFé um matriz 3x3 diagonal com os fatores de escala e&biasé um vetor 3x1 de bias. Quando o método falha, retorna um número negativo. -
O acelerômetro é calibrado com a função
int calibracaoAcelerometro(MatrixXf &X, MatrixXf data)A base desenvolvida possui o sensor preso como pode ser visto na figura abaixo:
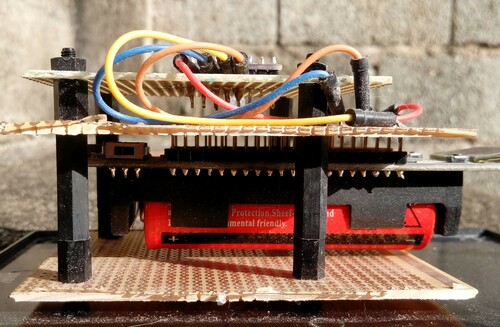
Depois de montada e fechada, o algoritmo de calibração do acelerômetro precisa da tomada de dados nas seis orientações para resolver o problema de mínimos quadrados. A base fechada como mostra a figura possibilita que essa tomada seja feita de forma simples.

- Os giroscópios são calibrados com a eliminação do erro sistemático com a função
Funcionalidade
O projeto fornece um vetor de dimensão 4+3+3+3+3+1 = 17 floats. Na seguinte sequência:
| Componentes do quatérnio de atitude | Ângulos de Euler | Acelerômetro | Magnetômetro | Giroscópio | Intervalo de tempo |
|---|---|---|---|---|---|
| normalizado | graus | m/s | normalizado | rad/s | segundos |
Divisão das tarefas
O ESP-32 possui dois núcleo como capacidade de realizar operações multitarefa. Um dos núcleos executa a função void estimadorCodigo(void *) e o outro a função void comunicacaoCodigo(void *), o primeiro executa o loop de estimação e o segundo comanda a telemetria.
Métodos de calibração
Os sensores são calibrados considerando:
- giroscópios
- Only remove the systematic errors
- Acelerômetros
- Kuncar, A., Sysel, M., & Urbanek, T. (2016). Calibration of triaxial accelerometer and triaxial magnetometer for tilt compensated electronic compass., 45–52. http://dx.doi.org/10.1007/978-3-319-33389-2_5
- Magnetômetros
- STMicroelectronics, (2010). Using LSM303DLH for a tilt compensated electronic compass.
Estimador de atitude
A estimação da atitude é feita com um filtro de Kalman linear e Quatérnios são utilizados para representar a atitude.